Three ideal observer models for rule learning in simple languages
Abstract
The phenomenon
of ‘‘rule learning’’—quick learning of abstract regularities from exposure to a limited set of
stimuli—has become an important model system for understanding generalization in
infancy. Experiments with adults and children have revealed differences in performance
across domains and types of rules. To understand the representational and inferential
assumptions necessary to capture this broad set of results, we introduce three ideal observer
models for rule learning. Each model builds on the next, allowing us to test the consequences
of individual assumptions. Model 1 learns a single rule, Model 2 learns a single
rule from noisy input, and Model 3 learns multiple rules from noisy input
Introduction:
1. Introduction: from ‘‘rules vs. statistics’’ to statistics
over rules
A central debate in the study of language acquisition
concerns the mechanisms by which human infants learn
the structure of their first language. Are structural aspects
of language learned using constrained, domain-specific
mechanisms (Chomsky, 1981; Pinker, 1991), or is this
learning accomplished using more general mechanisms
of statistical inference (Elman et al., 1996; Tomasello,
2003)?
Subsequent studies of rule learning in language acquisition
have addressed all of these questions, but for the most
part have collapsed them into a single dichotomy of ‘‘rules
vs. statistics’’ (Seidenberg & Elman, 1999). The poles of
‘‘rules’’ and ‘‘statistics’’ are seen as accounts of both how
infants represent their knowledge of language (in explicit
symbolic ‘‘rules’’ or implicit ‘‘statistical’’ associations) as
well as which inferential mechanisms are used to induce
their knowledge from limited data (qualitative heuristic
‘‘rules’’ or quantitative ‘‘statistical’’ inference engines). Formal
computational models have focused primarily on the
‘‘statistical’’ pole: for example, neural network models designed
to show that the identity relationships present in
ABA-type rules can be captured without explicit rules,
as statistical associations between perceptual inputs across
time (Altmann, 2002; Christiansen & Curtin, 1999;
Dominey & Ramus, 2000; Marcus, 1999; Negishi, 1999;
Shastri, 1999; Shultz, 1999, but c.f. Kuehne, Gentner, &
Forbus, 2000).
We believe the simple ‘‘rules vs. statistics’’ debate in
language acquisition needs to be expanded, or perhaps
exploded. On empirical grounds, there is support for both
the availability of rule-like representations and the ability
of learners to perform statistical inferences over these
representations. Abstract, rule-like representations are
implied by findings that infants are able to recognize
identity relationships (Tyrell, Stauffer, & Snowman,
1991; Tyrell, Zingaro, & Minard, 1993) and even newborns
have differential brain responses to exact repetitions
(Gervain, Macagno, Cogoi, Peña, & Mehler, 2008).
Learners are also able to make statistical inferences about
which rule to learn. For example, infants may have a preference
towards parsimony or specificity in deciding between
competing generalizations: when presented with
stimuli that were consistent with both an AAB rule and
also a more specific rule, AA di (where the last syllable
was constrained to be the syllable di), infants preferred
the narrower generalization (Gerken, 2006, 2010). Following
the Bayesian framework for generalization proposed
by Tenenbaum and Griffiths (2001), Gerken suggests that
these preferences can be characterized as the products of
rational statistical inference.
On theoretical grounds, we see neither a pure ‘‘rules’’
position nor a pure ‘‘statistics’’ position as sustainable or
satisfying. Without principled statistical inference mechanisms,
the pure ‘‘rules’’ camp has difficulty explaining
which rules are learned or why the right rules are learned
from the observed data. Without explicit rule-based representations,
the pure ‘‘statistics’’ camp has difficulty accounting for what is actually learned; the best neural
network models of language have so far not come close
to capturing the expressive compositional structure of language,
which is why symbolic representations continue to
be the basis for almost all state-of-the-art work in natural
language processing (Chater & Manning, 2006; Manning &
Schütze, 2000).
Driven by these empirical and theoretical considerations,
our work here explores a proposal for how concepts
of ‘‘rules’’ and ‘‘statistics’’ can interact more deeply in
understanding the phenomena of ‘‘rule learning’’ in human
language acquisition.
Our approach is to create computational
models that perform statistical inference over rulebased
representations and test these models on their fit
to the broadest possible set of empirical results. The success
of these models in capturing human performance
across a wide range of experiments lends support to the
idea that statistical inferences over rule-based representations
may capture something important about what human
learners are doing in these tasks.
Our models are ideal observer models: they provide a
description of the learning problem and show what the
correct inference would be, under a given set of assumptions.
The ideal observer approach has a long history in
the study of perception and is typically used for understanding
the ways in which performance conforms to or
deviates from the ideal (Geisler, 2003).
With few exceptions (Dawson & Gerken, 2009; Johnson
et al., 2009), empirical work on rule learning has been
geared towards showing what infants can do, rather than
providing a detailed pattern of successes and failures
across ages.
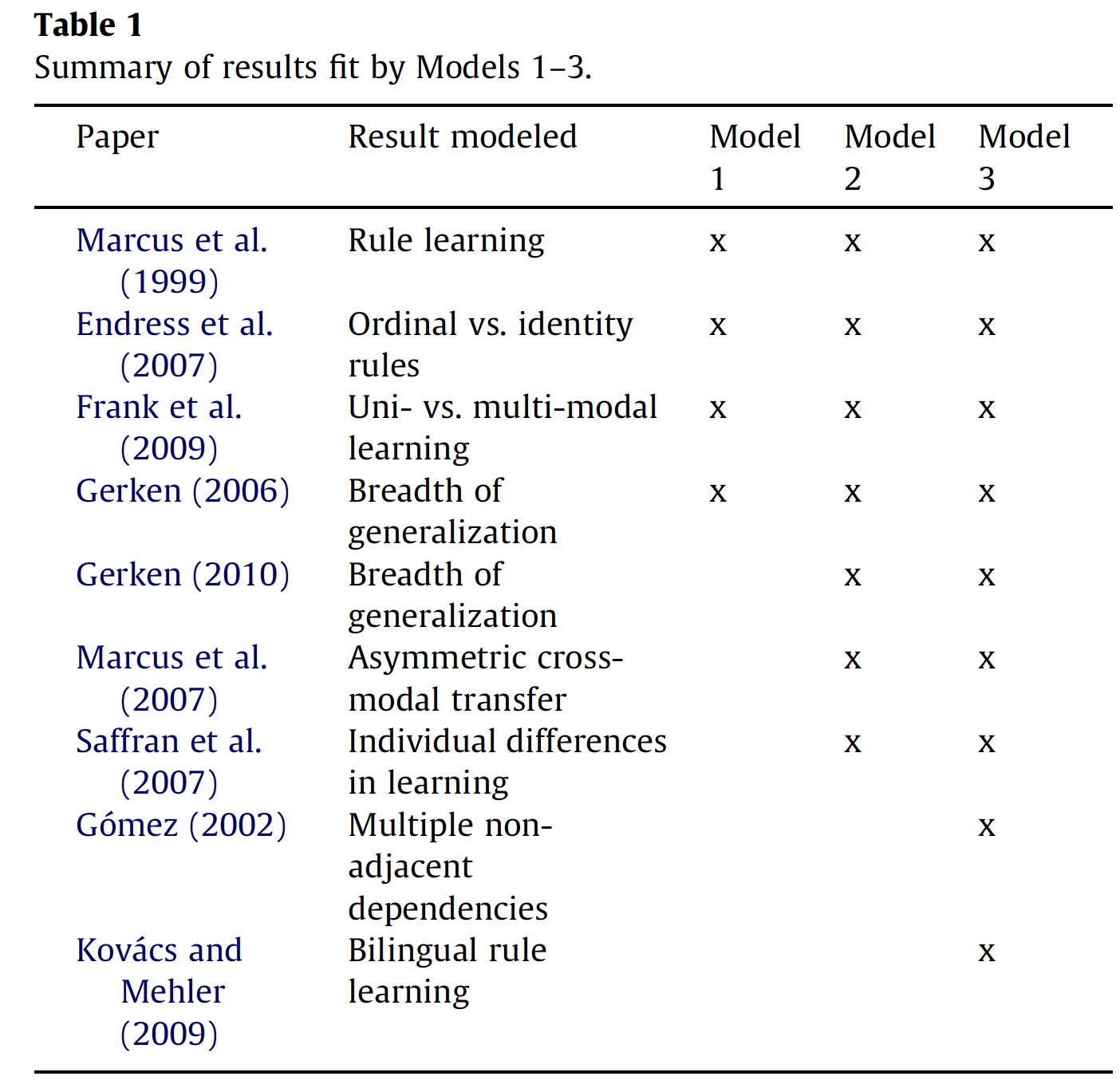
Models
The hypothesis space is constant
across all three models, but the inference procedure
varies depending on the assumptions of each model.
Our approach is to make the simplest possible assumptions
about representational components, including the
structure of the hypothesis space and the prior on hypotheses.
As a consequence, the hypothesis space of our models
is too simple to describe the structure of interesting phenomena
in natural language, and our priors do not capture
any of the representational biases that human learners
may brings to language acquisition.
Nevertheless, our hope is that this approach will help in
articulating the principles of generalization underlying
experimental results on rule learning.
2.1. Hypothesis space
This hypothesis space is based
on the idea of a rule as a restriction on strings. We define
the set of strings S as the set of ordered triples of elements
s1, s2, s3 where all s are members of vocabulary of elements,
V. There are thus |V|3 possible elements in S.
For each set of simulations, we define S as the total set
of string elements used in a particular experiment.
For example, in Marcus et al (1999): set of elements S = {ga, gi, ta, ti, na, ni, la, li}. These elements
are treated by our models as unique identifiers that do not
encode any information about phonetic relationships between
syllables.
A rule defines a subset of S. Rules are written as ordered
triples of primitive functions (f1, f2, f3). Each function operates
over an element in the corresponding position in a
string and returns a truth value. For example, f1 defines a
restriction on the first string element, x1. The set F of functions
is a set which for our simulations includes ^ (a function
which is always true of any element) and a set of
functions is y(x) which are only true if x = y where y is a
particular element. The majority of the experiments addressed
here make use of only one other function: the
identity function =a which is true if x = xa. For example, in
Marcus et al. (1999), learners heard strings like ga ti ti
and ni la la, which are consistent with (^, ^, =2) (ABB, or ‘‘second
and third elements equal’’). The stimuli in that experiment
were also consistent with another regularity,
however: (^,^,^), which is true of any string in S. One additional
set of experiments makes use of musical stimuli
for which the functions >a and <a (higher than and lower
than) are defined. They are true when x > xa and x < xa
respectively.
Model 1: single rule
Model 1 begins with the framework for generalization
introduced by Tenenbaum and Griffiths (2001). It uses exact
Bayesian inference to calculate the posterior probability
of a particular rule r given the observed set of training
sentences T = t1 . . . tm. This probability can be factored via
Bayes’ rule into the product of the likelihood of the training
data being generated by a particular rule p(T|r), and a prior
probability of that rule p®, normalized by the sum of
these over all rules:

We assume a uniform prior p® = 1/|R|, meaning that no
rule is a priori more probable than any other. For human
learners the prior over rules is almost certainly not uniform
and could contain important biases about the kinds of
structures that are used preferentially in human language
(whether these biases are learned or innate, domaingeneral
or domain-specific).
We assume that training examples are generated by
sampling uniformly from the set of sentences that are congruent
with one rule. This assumption is referred to as
strong sampling, and leads to the size principle: the probability
of a particular string being generated by a particular
rule is inversely proportional to the total number of strings
that are congruent with that rule (which we notate |r|).
Model 2: single rule under noise
Model 1 assumed that every data point must be accounted
for by the learner’s hypothesis. However, there
are many reasons this might not hold for human learners:
the learner’s rules could permit exceptions, the data could
be perceived noisily such that a training example might
be lost or mis-heard, or data could be perceived correctly
but not remembered at test. Model 2 attempts to account
for these sources of uncertainty by consolidating them all
within a single parameter. While future research will almost
certainly differentiate these factors (for an example
of this kind of work, see Frank, Goldwater, Griffiths, &
Tenenbaum, 2010), here we consolidate them for
simplicity.
To add noise to the input data, we add an additional
step to the generative process: after strings are sampled
from the set consistent with a particular rule, we flip a
biased coin with weight a. With probability a, the string
remains the same, while with probability 1 - a, the string
is replaced with another randomly chosen element.
Under Model 1, a rule had likelihood zero if any string in
the set T was inconsistent with it. With any appreciable level
of input uncertainty, this likelihood function would result
in nearly all rules having probability zero. To deal with
this issue, we assume in Model 2 that learners know that
their memory is fallible, and that strings may be misremembered
with probability 1 - a.

Model 3: multiple rules under noise
Model 3 loosens an additional assumption: that all the
strings in the input data are the product of a single rule. Instead,
it considers the possibility that there are multiple
rules, each consistent with a subset of the training data.
We encode a weak bias to have fewer rules via a prior
probability distribution that favors more compact partitions
of the input. This prior is known as a Chinese Restaurant
Process (CRP) prior (Rasmussen, 2000); it introduces a
second free parameter, c, which controls the bias over clusterings.
A low value of c encodes a bias that there are likely
to be many small clusters, while a high value of c encodes a
bias that there are likely to be a small number of large
clusters.
The joint probability of the training data T and a partition
Z of those strings into rule clusters is given by
P(T,Z) = P(T|Z)P(Z)
neglecting the parameters a and c. The probability of a
clustering P(Z) is given by CRP(Z,c).
Unlike in Models 1 and 2, inference by exact enumeration
is not possible and so we are not able to compute the
normalizing constant. But we are still able to compute the
relative posterior probability of a partition of strings into
clusters (and hence the posterior probability distribution
over rules for that cluster). Thus, we can use a Markovchain
Monte Carlo (MCMC) scheme to find the posterior
distribution over partitions. In practice we use a Gibbs
sampler, an MCMC method for drawing repeated samples
from the posterior probability distribution via iteratively
testing all possible cluster assignments for each string
(MacKay, 2003).
In all simulations we calculate the posterior probability
distribution over rules given the set of unique string types
used in the experimental stimuli. We use types rather than
rather than individual string tokens because a number of
computational and experimental investigations have suggested
that types rather than tokens may be a psychologically
natural unit for generalization (Gerken & Bollt, 2008;
Goldwater, Griffiths, & Johnson, 2006; Richtsmeier, Gerken,
& Ohala, in press).
To assess the probability of a set of test items
E = e1 . . . en (again computed over types rather than tokens)
after a particular training sequence, we calculate the total
probability that those items would be generated under a
particular posterior distribution over hypotheses. This
probability is

which is the product over examples of the probability of a
particular example, summed across the posterior distribution
over rules p(R|T). For Model 1 we compute p(ek|rj)
using Eq. (2); for Models 2 and 3 we use Eq. (4).
We use surprisal as our main measure linking posterior
probabilities to the results of looking time studies. Surprisal
(negative log probability) is an information-theoretic
measure of how unlikely a particular outcome is. It has
been used previously to model adult reaction time data
in sentence processing tasks (Hale, 2001; Levy, 2008) as
well as infant looking times (Frank, Goodman, &
Tenenbaum, 2009).
Results
Conclusions:
The infant language learning literature has often been
framed around the question ‘‘rules or statistics?’’ We suggest
that this is the wrong question. Even if infants represent
symbolic rules with relations like identity—and there
is every reason to believe they do—there is still the question
of how they learn these rules, and how they converge
on the correct rule so quickly in a large hypothesis space.
This challenge requires statistics for guiding generalization
from sparse data.
from sparse data.
In our work here we have shown how domain-general
statistical inference principles operating over minimal
rule-like representations can explain a broad set of results
in the rule learning literature.
The inferential principles encoded in our models—the
size principle (or in its more general form, Bayesian Occam’s
razor) and the non-parametric tradeoff between
complexity and fit to data encoded in the Chinese Restaurant
Process—are not only useful in modeling rule learning
within simple artificial languages. They are also the same
principles that are used in computational systems for natural
language processing that are engineered to scale to
large datasets. These principle have been applied to tasks
as varied as unsupervised word segmentation (Brent,
1999; Goldwater, Griffiths, & Johnson, 2009), morphology
learning (Albright & Hayes, 2003; Goldwater et al., 2006;
Goldsmith, 2001), and grammar induction (Bannard,
Lieven, & Tomasello, 2009; Klein & Manning, 2005; Perfors,
Tenenbaum, & Regier, 2006).
First, our models assumed the minimal machinery
needed to capture a range of findings. Rather than making
a realistic guess about the structure of the hypothesis
space for rule learning, where evidence was limited we assumed
the simplest possible structure. For example,
although there is some evidence that infants may not always
encode absolute positions (Lewkowicz & Berent,
2009), there have been few rule learning studies that go
beyond three-element strings. We therefore defined our
rules based on absolute positions in fixed-length strings.
For the same reason, although previous work on adult concept
learning has used infinitely expressive hypothesis
spaces with prior distributions that penalize complexity
(e.g. Goodman, Tenenbaum, Feldman, & Griffiths, 2008;
Kemp, Goodman, & Tenenbaum, 2008), we chose a simple
uniform prior over rules instead. With the collection of
more data from infants, however, we expect that both
more complex hypothesis spaces and priors that prefer
simpler hypotheses will become necessary.
Second, our models operated over unique string types
as input rather than individual tokens. This assumption
highlights an issue in interpreting the a parameter of Models
2 and 3: there are likely different processes of forgetting
that happen over types and tokens. While individual tokens
are likely to be forgotten or misperceived with constant
probability, the probability of a type being
misremembered or corrupted will grow smaller as more
tokens of that type are observed (Frank et al., 2010). An
interacting issue concerns serial position effects. Depending
on the location of identity regularities within sequences,
rules vary in the ease with which they can be
learned (Endress, Scholl, & Mehler, 2005; Johnson et al.,
2009). Both of these sets of effects could likely be captured
by a better understanding of how limits on memory interact
with the principles underlying rule learning. Although a
model that operates only over types may be appropriate
for experiments in which each type is nearly always heard
the same number of times, models that deal with linguistic
data must include processes that operate over both types
and tokens (Goldwater et al., 2006; Johnson, Griffiths, &
Goldwater, 2007).
Finally, though the domain-general principles we have
identified here do capture many results, there is some
additional evidence for domain-specific effects. Learners
may acquire expectations for the kinds of regularities that
appear in domains like music compared with those that
appear in speech (Dawson & Gerken, 2009); in addition, a
number of papers have described a striking dissociation
between the kinds of regularities that can be learned from
vowels and those that can be learned from consonants
(Bonatti, Peña, Nespor, & Mehler, 2005; Toro, Nespor,
Mehler, & Bonatti, 2008). Both sets of results point to a
need for a hierarchical approach to rule learning, in which
knowledge of what kinds of regularities are possible in a
domain can itself be learned from the evidence. Only
through further empirical and computational work can
we understand which of these effects can be explained
through acquired domain expectations and which are best
explained as innate domain-specific biases or constraints.